

En las entradas analógicas 0 y 5 del arduino recogemos la información del sensor.
El código del arduino es el siguiente
int pinIzquierdo = 0;
int pinDerecho = 5;
void setup(){
Serial.begin(9600);
pinMode( pinIzquierdo , INPUT );
pinMode( pinDerecho , INPUT );
}//setup
void loop(){
delay(500);
Serial.print( analogRead ( pinIzquierdo ) );
Serial.print( " " );
Serial.print( analogRead ( pinDerecho ) );
Serial.println();
Serial.flush();
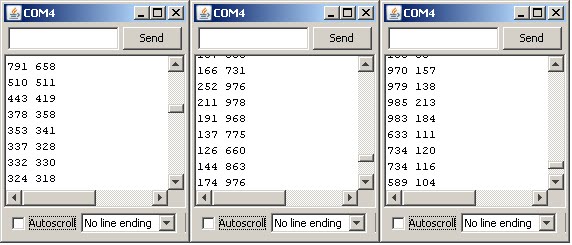
}//loopY aquí está la salida que se muestra por el monitor serie.
A la izquierda de cuando detecta blanco por ambos lados. En el centro cuando detecta blanco a un lado y negro al otro. Y a la izquierda viceversa.

No hay comentarios:
Publicar un comentario